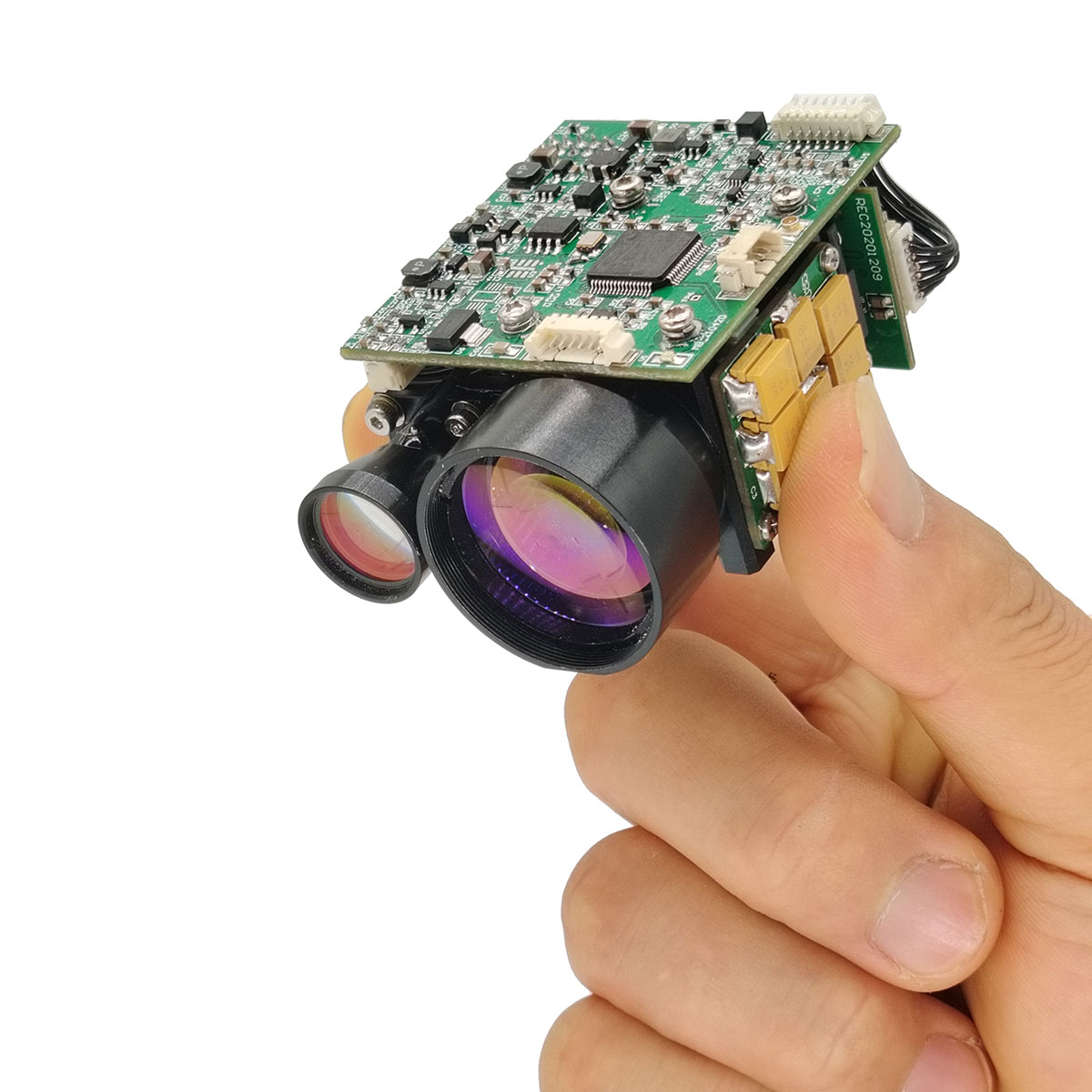
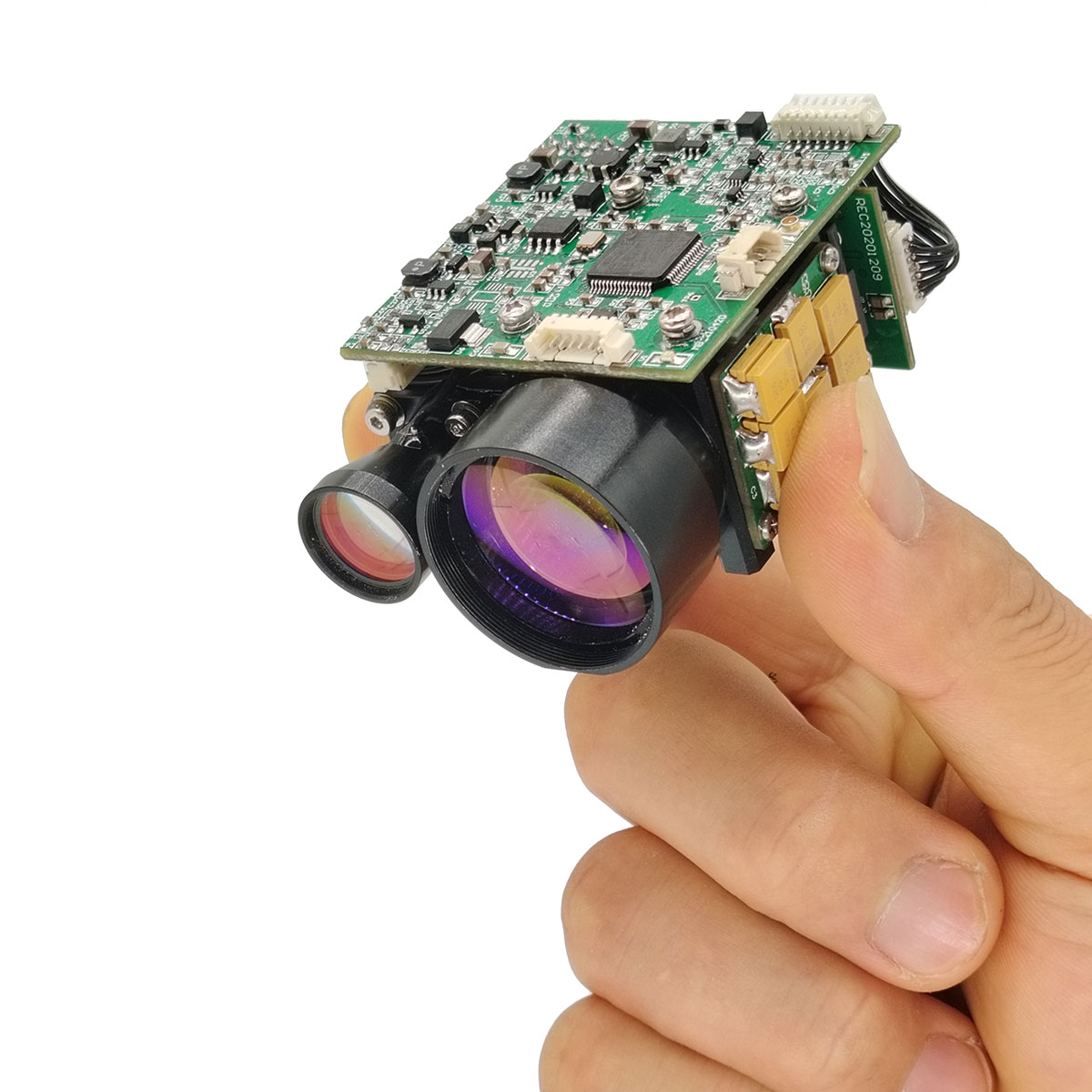
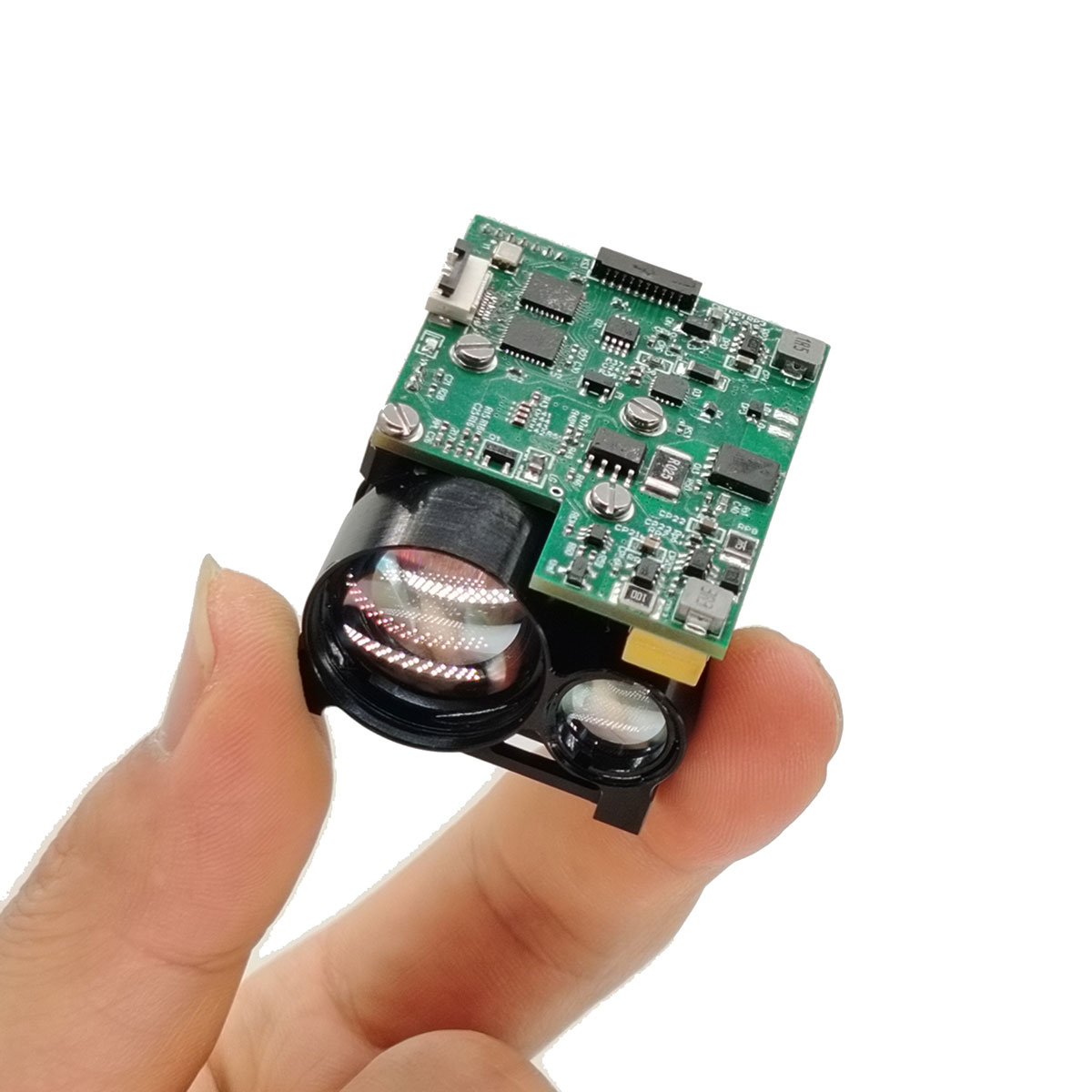
STA-B50X è un modulo di misurazione della distanza laser sicuro per gli occhi umani, in grado di rilevare la distanza target e trasmettere la distanza misurata al computer superiore tramite la comunicazione seriale. Visibilità ≥ 12 km, riflettività del bersaglio ≥ 0,3, umidità ≤ 80%, distanza del veicolo (bersaglio NATO 2,3 m × 2,3 m) ≥ 5 km.
(1) Campo singolo e campo continuo;
(2) Rispondere ai comandi di misurazione del raggio laser e può interrompere la misurazione in qualsiasi momento in base al comando di arresto;
(3) Inviare i dati sulla distanza e le informazioni sullo stato una volta per impulso durante la misurazione della distanza;
(4) Può riportare il numero cumulativo di impulsi laser trasmessi (nessuna perdita di alimentazione);
(5) Selezione della distanza, indicazione del target anteriore e posteriore;
(6) Funzione di autotest.
| Articolo | Parametro tecnico | Istruzioni |
| Modello | STA-B50X | |
| Lunghezza d'onda di lavoro | 1535±5 nm | |
| Sicurezza degli occhi | Classe 1 (IEC 60825-1) | |
| Apertura di ricezione | Φ25mm | |
| Apertura di emissione | Φ10mm | |
| Capacità di variare | 30-8000m | |
| Gamma di portata | ≥10000 m | Portata MAX, riflettività: 0,9, visibilità dell'osservatore 25 km |
| ≥7000m | Obiettivi di edifici di grandi dimensioni, riflettività: 0,6, visibilità dell'osservatore 20 km | |
| ≥5000 m | Obiettivo della NATO | |
| ≥3000m | Obiettivo umano | |
| ≥1500m | Obiettivo dell'UAV | |
| Minigamma | 30m | |
| Rilevamento multi-bersaglio | Fino a 3 obiettivi | |
| Risoluzione della portata | 30m | |
| Precisione di portata | ±1m | |
| Frequenza di intervallo | 1~10Hz regolabile | |
| Tasso di precisione | ≥98% | |
| Tasso di falsi allarmi | 1% | |
| Angolo di divergenza | ≤0,5 mrad | |
| Interfaccia di comunicazione | RS422 | L'interfaccia TTL/RS232 può essere personalizzata |
| Voltaggio | CC 9 ~ 32 V | |
| Consumo energetico | ≤1,2W(@1hz) | Potenza di lavoro |
| ≤5W@12V | Potenza di picco | |
| 0,1 W | Alimentazione in standby (Collegare POWER-ON) | |
| Stabilità dell'asse ottico del laser | ≤0,05 mrad | |
| Errore parallelo | ≤0,3 mrad | Errore di parallelismo dell'asse ottico rispetto al riferimento di montaggio |
| Shock meccanico | 75 g, 1 ms | |
| Temperatura di lavoro | -40℃~+70℃ | |
| Temperatura di conservazione | -55℃~+75℃ | |
| Affidabilità | MTBF ≥ 1500 ore | |
| Misurare | ≤50x32x43,5 mm | |
| Peso | ≤75g | |
| Funzione principale | Primo e ultimo raggio d'azione, Portata multi-bersaglio, Selettività a distanza |
|
Note:
1) dimensione del bersaglio NATO 2,3 m × 2,3 m; Dimensioni del bersaglio umano 0,5 m × 1,7 m; Dimensione bersaglio UAV 0,2 m × 0,3 m; Riflettività 30%, Umidità ≤ 80%, visibilità dell'osservatore ≥ 12 km

| spillo | definizione | spiegare |
| 1 | TERRA | Corda |
| 2 | Il potere è | Alimentazione, da 3 a 5 V |
| 3 | UART_NC | (vuoto) |
| 4 | UART_TX | Trasmettitore porta seriale, livello TTL_3.3V |
| 5 | UART_RX | Estremità di ricezione della porta seriale, con livello TTL_3.3V |
| 6 | ACCENSIONE_ON | Interruttore di alimentazione del modulo, livello TTL_3.3V; (> 0,7 V attivato, <0,15 V disattivato per impostazione predefinita) |
| Spillo | Definizione | Funzione | Note |
| 1 | RX+ | Ricevitore RS422+ | Blu |
| 2 | RX- | Ricevitore RS422 - | Verde |
| 3 | TX- | Trasmissione RS422 - | Viola |
| 4 | TX+ | Trasmissione RS422 + | Giallo |
| 5 | TERRA | Filo di terra della comunicazione | Bianco |
| 6 | VEE | Alimentazione + | Rosso |
| 7 | TERRA | Alimentazione elettrica - | Nero |
| 8 | PWR IT | / | Cenere |
Moduli OEM/ODM e soluzioni personalizzate
Il B50X è progettato per gli integratori di sistema che cercano una soluzione di rilevamento laser comoda, potente e compatta. Fornisce prestazioni affidabili in un'ampia gamma di applicazioni.
È molto piccolo, ultraleggero, ha un basso consumo energetico e può essere misurato a lunga distanza. È adatto per dispositivi portatili (imaging termico), applicazioni di montaggio di armi, sistemi portatili e suite di sensori leggeri e veicoli aerei senza pilota o UGV.
1. Protocollo di trasmissione: comunicazione seriale asincrona;
2. Tariffa portuale: 115200;
3. Bit di dati: 10 bit: un bit di inizio, 8 bit di dati, un bit di stop, verifica non valida;
4. Struttura dei dati: i dati sono costituiti da byte di intestazione, parte di comando, lunghezza dei dati, parte di parametro e byte di controllo;
5. Modalità di comunicazione: il controllo principale invia comandi di controllo alla macchina che misura e la macchina che misura riceve ed esegue le istruzioni. Nello stato di misurazione, la macchina di misurazione invia i dati e lo stato della macchina di misurazione al computer superiore in base al ciclo di misurazione. Il formato di comunicazione e il contenuto del comando sono mostrati nella tabella seguente.
A) Invii di controllo principali
Il formato del messaggio da inviare è il seguente:
| STX0 | CMD | LUNGHEZZA | DATI1H | DATI1L | CHK |
Tabella 2 Descrizione del formato del messaggio inviato
| numero dell'ordine | nome | spiegare | codice | osservazioni |
| 1 | STX0 | Flag di inizio messaggio | A5(H) | |
| 2 | CMD | CW | Vedi tabella 3 | |
| 3 | LUNGHEZZA | DL | Il numero di tutti i byte tranne il contrassegno di inizio, la parola di comando e il checksum | |
| 4 | DATI | parametro | Vedi tabella 3 | |
| 5 | DATI | |||
| 6 | CHK | Verifica XOR | Ad eccezione del byte valido, tutti gli altri byte vengono sottoposti a XOR |
Il comando è descritto come segue:
Tabella 3 Descrizione dei comandi e delle parole dati inviate dal master alla macchina di rilevamento
| numero dell'ordine | CW | funzione | byte di dati | osservazioni | lunghezza | Codice di esempio |
| 1 | 0x00 | cessare | DATIH=00(H) DATI=00(H) |
Il telemetro smette di misurare | Sei byte | A5 00 02 00 00 A7 |
| 2 | 0x01 | Gamma singola | DATIH=00(H) DATI=00(H) |
Sei byte | A5 01 02 00 00 A6 | |
| 3 | 0x02 | Gamma continua | DATIH=XX(H) DATI=AA(H) |
DATA descrive il periodo di intervallo, in ms | Sei byte | A5 02 02 03 E8 4E (intervallo 1Hz) |
| 4 | 0x03 | autocontrollo | DATIH=00(H) DATI=00(H) |
Sei byte | A5 03 02 00 00 A4 | |
| 5 | 0x04 | Imposta la distanza più vicina alla selezione | DATIH=XX(H) DATI=AA(H) |
DATI descrive il valore della zona cieca, unità 1m | Sei byte | A5 04 02 00 64 C7 (100 m è la distanza più vicina) |
| 6 | 0x06 | Numero cumulativo di query sull'emissione luminosa | DATIH=00(H) DATI=00(H) |
Numero cumulativo di query sull'emissione luminosa | Sei byte | A5 06 02 00 00 A1 |
| 7 | 0x11 | L'alimentazione dell'APD è accesa | DATIH=00(H) DATI=00(H) |
Sei byte | A5 11 02 00 00 B6 | |
| 8 | 0x12 | L'alimentazione dell'APD è disattivata | DATIH=00(H) DATI=00(H) |
Sei byte | A5 12 02 00 00 B5 | |
| 9 | 0xEB | Interrogazione sul numero | DATIH=00(H) DATI=00(H) |
Interrogazione sul numero | Sei byte | A5 EB 02 00 00 4C |
a) Il controllo principale riceve il formato
Il formato del messaggio ricevuto è il seguente:
| STX0 | CMD | LUNGHEZZA | DATIn | DATI0 | CHK |
Tabella 4 Descrizione del formato dei messaggi ricevuti
| numero dell'ordine | nome | spiegare | codice | osservazioni |
| 1 | STX0 | Flag di inizio messaggio 1 | A5(H) | |
| 2 | CMD_JG | Parola di comando dati | Vedi tabella 5 | |
| 3 | LUNGHEZZA | DL | Il numero di tutti i byte tranne il contrassegno di inizio, la parola di comando e il checksum | |
| 4 | Dn | parametro | Vedi tabella 5 | |
| 5 | D0 | |||
| 6 | CHK | Verifica XOR | Ad eccezione del byte valido, tutti gli altri byte vengono sottoposti a XOR |
Descrizione dello stato di ricezione del controllo principale:
La Tabella 5 descrive la parola dati inviata dal telemetro al controller master
| numero dell'ordine | CW | funzione | byte di dati | osservazioni | lunghezza complessiva |
| 1 | 0x00 | cessare | D1=00(H) D0=00(H) |
Sei byte | |
| 2 | 0x03 | autocontrollo | D8 ~D1 | D8-D7: tensione -5 V, unità 0,01 V. D6-D5: valore del punto cieco, unità 1 m D4: valore alta tensione APD, unità V; D3: tipo di carattere, che indica la temperatura APD, unità: gradi Celsius; D2-D1: tensione +5 V, unità 0,01 V |
12 byte |
| 3 | 0x04 | Distanza dall'impostazione di accesso più vicina, unità m | D1 D0 | DATA descrive il valore della distanza più vicino, unità 1 m; Inizia in alto e finisci in basso |
Sei byte |
| 4 | 0x06 | Numero cumulativo di query sull'emissione luminosa | D3~D0 | DATA esprime il numero di luci, 4 byte, con il byte alto per primo | Sette byte |
| 5 | 0x11 | L'alimentazione dell'APD è accesa | D1=00(H) D0=00(H) |
L'alimentazione dell'APD è accesa | Sei byte |
| 6 | 0x12 | Spegnimento dell'APD | D1=00(H) D0=00(H) |
L'alimentazione dell'APD è disattivata | Sei byte |
| 7 | 0xED | Fare gli straordinari | 0x00 0x00 | Il laser è protetto dal laser e non può essere misurato. | Sei byte |
| 8 | 0xEE | Errori di efficacia | 0x00 0x00 | Sei byte | |
| 9 | 0XEF | Timeout della comunicazione sulla porta seriale | 0x00 0x00 | Sei byte | |
| 10 | 0x01 | Misurazione della portata singola (bersaglio singolo, zero per il secondo e il terzo bersaglio, zero per il terzo bersaglio all'inizio e alla fine del bersaglio) | D9 D8 D7 D6 D5 D4 D3 D2 D1 D0 |
D8-D6 distanza primo target (unità 0,1 m) D5-D3 distanza dal secondo bersaglio (unità: 0,1 m) D2-D0 terza distanza target (unità 0,1 m) 3. Gli obiettivi sono da vicino a lontano Byte flag D9 (bit7-bit0): D9 è la settima posizione che indica l'onda principale; 1: c'è un'onda principale, 0: nessuna onda principale. D9 è la sesta posizione che indica l'eco; 1: c'è eco, 0: nessuna eco D9 La quinta posizione indica lo stato del laser; 1: laser normale, 0: guasto laser D9 è il quarto bit del flag di timeout, 1: normale, 0: timeout D9 non è valido nella 3a posizione (impostato a 1); D9 La seconda posizione indica lo stato dell'APD; 1: normale, 0: errore D9 è la prima posizione per indicare se esiste un target precedente; 1: c'è un bersaglio precedente, 0: nessun bersaglio precedente (bersaglio nell'area cieca). D9 Il bit 0 indica se c'è un target successivo; 1: c'è un target successivo, 0: nessun target successivo (il target dopo il target principale è il target successivo) |
14 byte |
| 11 | 0x02 | Distanza continua (bersaglio singolo, zero per il secondo e il terzo bersaglio, zero per il terzo bersaglio all'inizio e alla fine del bersaglio) | D9 D8 D7 D6 D5 D4 D3 D2 D1 D0 |
D8-D6 distanza primo target (unità 0,1 m) D5-D3 distanza dal secondo bersaglio (unità: 0,1 m) D2-D0 terza distanza target (unità 0,1 m) 3. Gli obiettivi sono da vicino a lontano Byte flag D9 (bit7-bit0): D9 è il 7° bit per indicare l'onda principale; 1: c'è un'onda principale, 0: nessuna onda principale. D9 è la sesta posizione che indica l'eco; 1: c'è eco, 0: nessuna eco D9 La quinta posizione indica lo stato del laser; 1: laser normale, 0: guasto laser D9 è il quarto bit del flag di timeout, 1: normale, 0: timeout D9 non è valido nella 3a posizione (impostato a 1); D9 La seconda posizione indica lo stato dell'APD; 1: normale, 0: errore D9 è la prima posizione per indicare se esiste un target precedente; 1: c'è un bersaglio precedente, 0: nessun bersaglio precedente (bersaglio nell'area cieca). D9 Il bit 0 indica se c'è un target successivo; 1: c'è un target successivo, 0: nessun target successivo (il target dopo il target principale è il target successivo) |
14 byte |
| 12 | 0xEB | Interrogazione sul numero | D17…… D0 | D17 D16 D15 D14 D13 D12 Codice modello macchina intera D11D10 Codice prodotto Versione software D9 D6 D5 D4 Numero APD D3 D2 Numero del laser Versione D1 dell'FPGA |
22 byte |
| Nota: ① Byte/bit di dati non definiti, il valore predefinito è 0; | |||||
Per ulteriori informazioni sui nostri prodotti, contattare Jioptik.