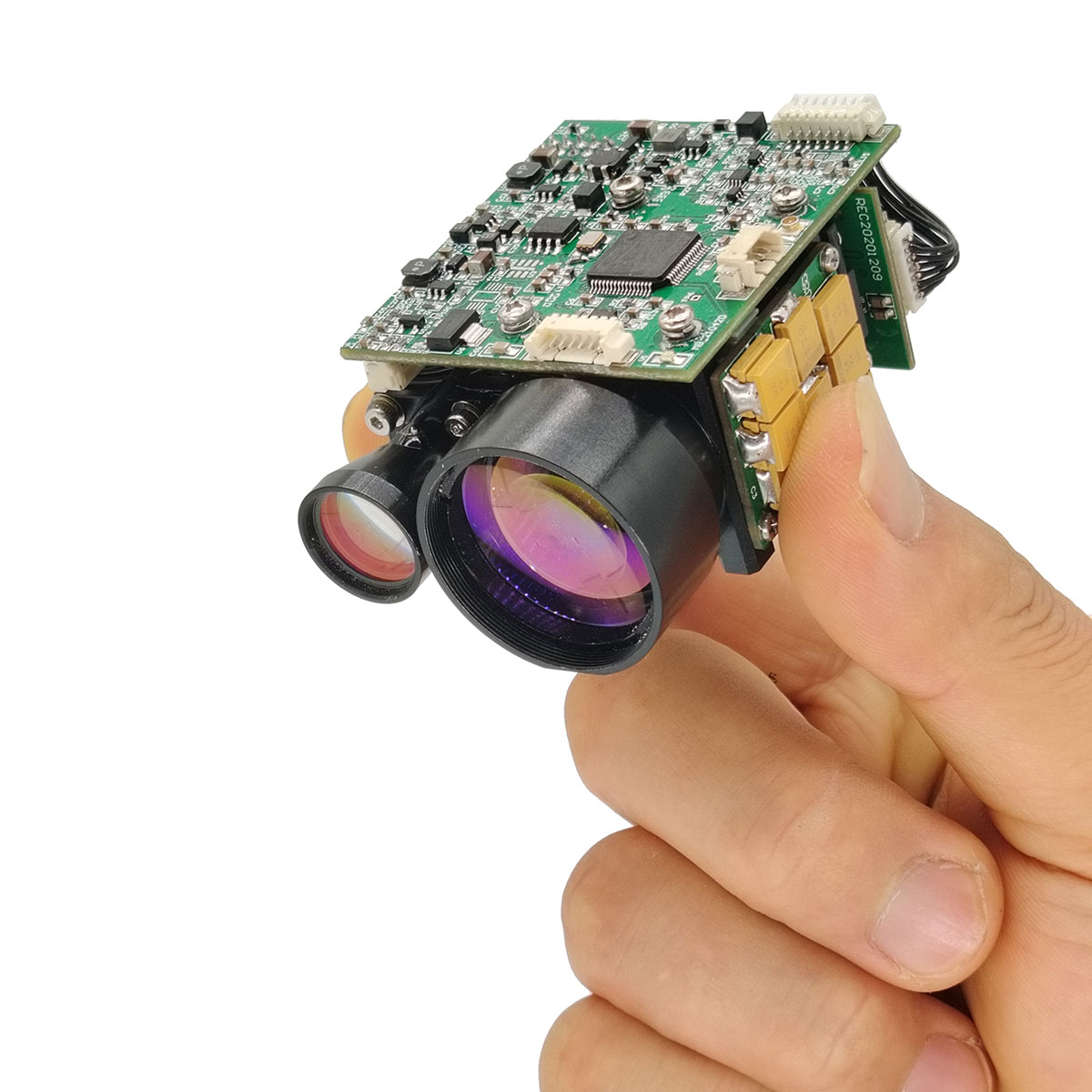
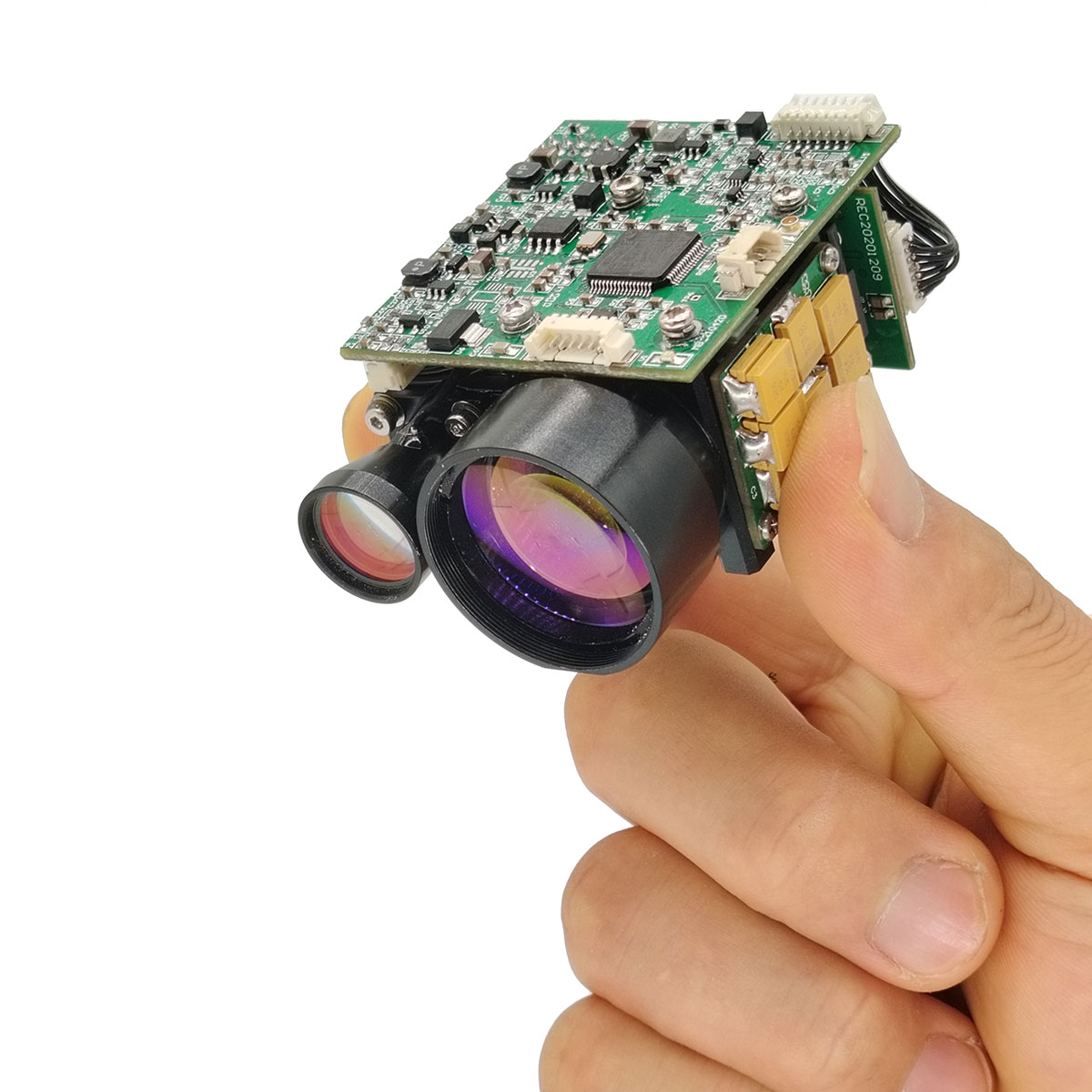
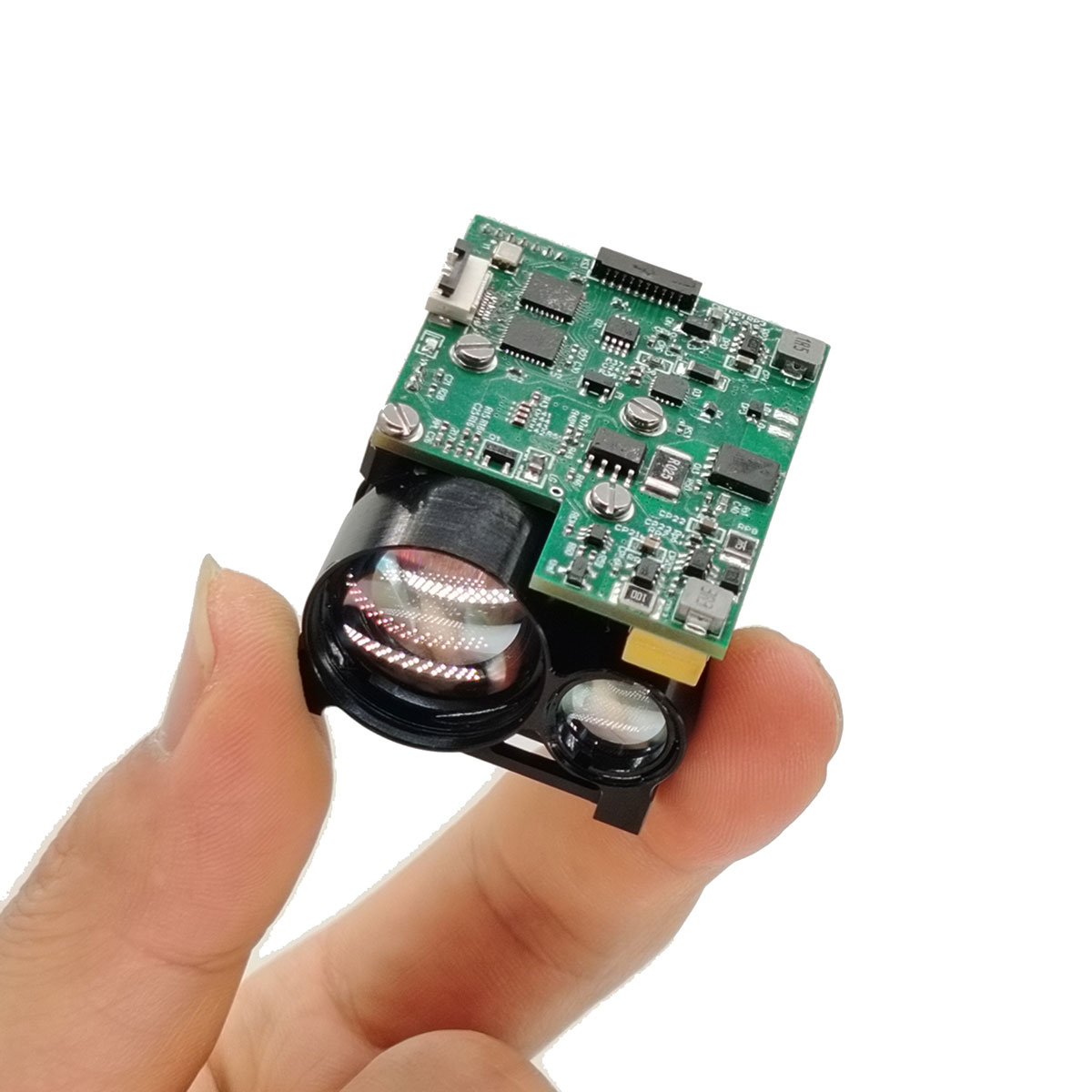
● Il modulo telemetro laser STA-C1826X adotta un componente laser in vetro erbio da 1535 nm sviluppato internamente, che ha le caratteristiche di lungo raggio, basso consumo energetico, dimensioni ridotte e sicurezza per l'occhio umano. Puoi essere certo di acquistare il modulo telemetro laser per la sicurezza degli occhi da 18 km dalla nostra fabbrica.
● Prestazioni di portata: 18.000 m (bersaglio NATO), 26.000 m (portata massima)
● Precisione di portata ± 1 m
● Precisione di misurazione ≥ 98%
● Peso ≤ 380 g
Il modulo telemetro laser per la sicurezza degli occhi da 18 km STA-C1826X presenta un design sicuro, una struttura leggera, un consumo energetico ridotto, una durata di vita estesa e un ampio intervallo di temperature. Ampiamente utilizzato in compiti quali ricognizione, rilevamento e mappatura, questo modulo telemetro laser è privo di guscio ma fornisce una vasta gamma di interfacce per una facile integrazione in diversi sistemi. Gli utenti beneficiano della comodità del software per PC e dei protocolli di comunicazione, migliorando l'usabilità dei dispositivi portatili e dei sistemi multifunzionali.
Gamma a colpo singolo e gamma continua
Rilevamento di 3 bersagli, indicazione del bersaglio anteriore e posteriore
Contiene la funzione di autocontrollo
Funzione wake-on-lan
Numero di impulsi emessi durante MNBF ≥1×106 volte
Dispositivi portatili
Veicolo aereo senza equipaggio
Pod elettro-ottico
Sorveglianza delle frontiere
| Progetto | Indicatori di prestazione | |
| Modello | STA-C1826X | |
| Lunghezza d'onda del laser | 1535±5 nm | |
| Sicurezza degli occhi | Classe Ⅰ (IEC 60825-1) | |
| Angolo di divergenza | ≤0,3 mrad | |
| Campo visivo di ricezione (FOV) | ~ 1,8 milioni dirad | |
| Avvia il diametro della lente | Φ18mm | |
| Diametro lente del ricevitore | Φ60mm | |
| Campo di misurazione (riflettanza 30%; visibilità ≥28 km) | Gamma MAX | ≥30000 mt |
| Grande bersaglio | ≥23000 mt | |
| Obiettivo della NATO | ≥20000 mt | |
| Persone (0,5 m×1,7 m) | ≥11000 mt | |
| UAV (0,2x0,3 m) | ≥4000 mt | |
| Portata minima | 50 metri | |
| Frequenza di intervallo | 0,5~10 Hz | |
| Precisione di portata | ±1 m | |
| Risoluzione della portata | ≤30 mt | |
| Tasso di precisione | ≥98% | |
| Tasso di falsi allarmi | ≤1% | |
| Numero di rilevamenti multi-target | Fino a 3 bersagli | |
| Interfaccia elettrica | molex-532610771 | |
| Tensione di alimentazione | 12 Vcc | |
| Consumo energetico in standby | ≤1,2 W | |
| Consumo energetico medio | ≤2 W | |
| Consumo energetico di picco | ≤3W | |
| Peso | ≤380g | |
| Dimensioni (L×L×A) | 125 mm×100 mm×70 mm | |
| Temperatura operativa | -40~+70℃ | |
| Temperatura di conservazione | -55~+75℃ | |
| Resistenza agli urti | 1200 g/1 ms(GJB150. 16A-2009) | |
| Anti-vibrazione | 5~50~5 Hz, intervallo di 1 ottava/min, 2,5 g | |
| Logica che spazia | Primo e ultimo bersaglio, distanza multi-bersaglio, selettività della distanza | |
| Orario di attivazione | ≤950 ms | |
| Interfaccia dati | RS422 | |
| Isolamento elettrico | Isolamento della terra di potenza, della terra di comunicazione e della terra della struttura | |
| Affidabilità | MTBF ≥ 1500 ore | |
| Stabilità dell'asse ottico | ≤0,05 mrad | |
| Non parallelismo tra asse ottico e superficie di montaggio | ≤0,5 mrad | |
| Classe di protezione | IP67 | |
| Classe ESD | (Posizione dell'obiettivo) Scarica a contatto 6kV Scarica in aria 8kV |
|
| Compatibilità elettromagnetica (EMC) | Certificazione CE/FCC | |
| Ecologico | RoHS2.0 | |

Modello connettore elettrico: J30J; Le spine e i cavi corrispondenti saranno forniti dalla Parte B. La definizione dettagliata delle interfacce elettriche è mostrata nella tabella seguente:
Tabella 1 Definizione dell'interfaccia
| Spillo | Definizione |
| 1 | TERRA |
| 2 | TERRA |
| 3 | TERRA |
| 4 | VCC 12V |
| 5 | VCC 12V |
| 6 | RS422RX+ |
| 7 | RS422 RX- |
| 8 | RS422 TX- |
| 9 | RS422TX+ |
La trasmissione dei dati tra il telemetro e il computer superiore include quanto segue:
Comandi di controllo: inclusa la misurazione della distanza iniziale, la misurazione continua della distanza, la misurazione della distanza singola, i comandi di interrogazione, ecc.
Dati di ritorno: comprese informazioni sulla distanza, temperatura ambiente, stato del telemetro, ecc. Lo scambio di dati tra il telemetro e il computer superiore adotta il bus 422. Il protocollo di comunicazione del software specifico è il seguente:
Formato di comunicazione: comunicazione RS422, velocità di trasmissione 115200bps;
Formato dati: dati a 8 bit, un bit di inizio, un bit di stop, senza controllo di parità. I dati sono costituiti da un byte di intestazione, una parte di comando, una lunghezza dei dati, una parte di parametri e un byte di checksum;.
Metodo di comunicazione: il controllo master e il telemetro adottano un metodo di comunicazione master-slave. Il controllo principale invia comandi di controllo al telemetro e il telemetro riceve ed esegue i comandi. Nello stato di misurazione, il telemetro invia i dati e lo stato del telemetro al computer superiore in base al ciclo di misurazione. Il formato di comunicazione e il contenuto del comando sono mostrati nella tabella seguente.
Invio principale
Il formato del messaggio inviato è il seguente:
| STX0 | CMD | LUNGHEZZA | DATI1H | DATI1L | CHK |
Invia la descrizione del formato del messaggio
Tabella 2 Descrizione del formato del messaggio di invio
| NO. | Nome | illustrare | Codice | Osservazione |
| 1 | STX0 | Flag di inizio messaggio | 55(H) | |
| 2 | CMD | Parola di comando | Vedi tabella 3 | |
| 3 | LUNGHEZZA | Lunghezza dei dati | Il numero di tutti i byte tranne il flag di avvio, la parola di comando e il checksum | |
| 4 | DATI | parametro | ||
| 5 | arrivo | |||
| 6 | CHK | Controllo XOR | Ad eccezione del byte di convalida, gli altri byte vengono sottoposti a XOR |
Il comando è descritto come segue:
Tabella 3 Descrizione dei comandi e delle parole dati inviati dal controllo principale alla macchina di misura della distanza
| NO. | Parola di comando | Funzioni | Byte di dati | Osservazioni | Lunghezza | codice di esempio (informatica) |
| 1 | 0x00 | Stand-by (arresto a portata continua) |
DATIH=00(H) DATI=00(H) | Distanza misurazione la macchina smette di funzionare |
6 byte | 55 00 02 00 00 57 |
| 2 | 0x01 | Gamma singola | DATIH=00(H) DATI=00(H) | 6 byte | 55 01 02 00 00 56 | |
| 3 | 0x02 | Gamma continua | DATIH=XX(H) DATI=YY(H) | DATI esprime il periodo che va in ms. |
6 byte | 55 02 02 03 E8 BE (intervallo 1Hz) |
| 4 | 0x03 | Autotest | DATIH=00(H) DATI=00(H) | 6 byte | 55 03 02 00 00 54 | |
| 5 | 0x04 | Selezione della distanza e più vicino impostazione della distanza |
DATIH=XX(H) DATI=YY(H) | DATI esprime la zona cieca valore, unità 1m |
6 byte | 55 04 02 00 64 37 (100 m più vicino) |
| 6 | 0x06 | Cumulativo query sul numero di luci spente |
DATIH=00(H) DATI=00(H) | Cumulativo query sul numero di luci spente |
6 byte | 55 06 02 00 00 51 |
| 7 | 0x11 | Accensione dell'APD | DATIH=00(H) DATI=00(H) | 6 byte | 55 11 02 00 00 46 | |
| 8 | 0x12 | Spegnimento dell'APD | DATIH=00(H) DATI=00(H) | 6 byte | 55 12 02 00 00 45 | |
| 9 | 0xEB | Interrogazione sul numero | DATIH=00(H) DATI=00(H) | 6 byte | 55 EB 02 00 00 a.C |
l Formato di ricezione principale
Il formato del messaggio di ricezione è il seguente:
| STX0 | CMD | LUNGHEZZA | DATI | DATA0 | CHK |
Tabella 4 Descrizione del formato del messaggio di ricezione
| NO. | Nome | Descrizione | Codice | Osservazioni |
| 1 | STX0 | Flag di inizio messaggio 1 | 55(H) | |
| 2 | CMD_JG | Parola di comando dati | Vedere la tabella 5 | |
| 3 | LUNGHEZZA | Lunghezza dei dati | Numero di tutti i byte tranne il flag di avvio, la parola di comando e il checksum | |
| 4 | Dn | Parametro | Vedere la tabella 5 | |
| 5 | D0 | |||
| 6 | CHK | Somma di controllo | Tutti i byte tranne il byte di parità |
Il master riceve la descrizione dello stato:
Tabella 5 Descrizione della parola dati inviata dal Ran efinder al controllo master
| NO. | parola di comando | Funzioni | Byte di dati | Osservazioni | Lunghezza totale |
| 1 | 0x00 | Standby (arresto della portata continua) | D1=00(H) D0=00(H) | 6 byte | |
| 2 | 0x03 | Autotest | D7~D0 | D0: tipo char, indica la temperatura APD in gradi Celsius; D1: valore APD alta tensione, unità V; D3-D2: valore cieco, unità 1m D5-D4: tensione -5 V, unità 0,01 V. D7-D6: tensione +5 V, unità 0,01 V |
12 byte |
| 3 | 0x04 | Impostazione della distanza più vicina all'opt-in, unità m | D1 D0 | DATA esprime il valore della distanza più vicina in 1m; Prima alto, poi basso |
6 byte |
| 4 | 0x06 | Numero cumulativo di query di spegnimento | D3~D0 | DATA esprime il numero di volte in cui la luce viene emessa, 4 byte, il byte alto viene per primo | 8 byte |
| 5 | 0x11 | Accensione dell'APD | DATIH=00(H) DATI=00(H) | APD con alta tensione | 6 byte |
| 6 | 0x12 | Spegnimento dell'APD | DATIH=00(H) DATI=00(H) | APD senza alta tensione | 6 byte |
| 7 | 0xED | Timeout di lavoro | 0x00 0x00 | Il laser è in protezione laser e non può misurare la distanza. | 6 byte |
| 8 | 0xEE | Errore di convalida | 0x00 0x00 | 6 byte | |
| 9 | 0XEF | Timeout della comunicazione seriale | 0x00 0x00 | 6 byte | |
| 10 | 0x01 | Misurazione della distanza singola | D9 D8 D7 D6 D5 D4 D3 D2 D1 D0 |
D8-D6 prima distanza target (unità 0,1 m) D5-D3 distanza del secondo target (i dati sono 0 se il target è singolo) (unità 0,1 m) D2-D0 distanza del terzo target (i dati sono 0 se il target è singolo) (unità 0,1 m) 3 target da vicino a lontano D9 (bit7-bit0) flag byte: D9 bit 7 indica l'onda principale; 1: con onda principale, 0: senza onda principale. D9 bit 6 indica l'onda di ritorno; 1: con onda di ritorno, 0: senza onda di ritorno D9 bit 5 indica lo stato del laser; 1: laser normale, 0: laser guasto D9 bit 4 allarme timeout; 1 normale, 0 timeout D9 bit 3 non valido, = 1 D9 bit 2 indica lo stato dell'APD; 1: normale, 0: errore D9 bit 1 indica se esiste un precedente bersaglio; 1: target, 0: nessun target (il target prima l'obiettivo principale è l'obiettivo precedente) D9 bit 0 indica se c'è un post- bersaglio; 1: con target, 0: senza target (the il target dopo il target principale è il after-target) |
14 byte |
| 11 | 0x02 | Misurazione continua della distanza | D9 D8 D7 D6 D5 D4 D3 D2 D1 D0 |
D8-D6 prima distanza target (unità 0,1 m) D5-D3 distanza del secondo target (i dati sono 0 se il target è singolo) (unità 0,1 m) D2-D0 distanza del terzo target (i dati sono 0 se il target è singolo) (unità 0,1 m) 3 target da vicino a lontano D9 (bit7-bit0) flag byte: D9 bit 7 indica l'onda principale; 1: con onda principale, 0: senza onda principale. D9 bit 6 indica l'onda di ritorno; 1: con onda di ritorno, 0: senza onda di ritorno D9 bit 5 indica lo stato del laser; 1: laser normale, 0: laser guasto D9 bit 4 allarme timeout; 1 normale, 0 timeout D9 bit 3 non valido, = 1 D9 bit 2 indica lo stato dell'APD; 1: normale, 0: errore D9 bit 1 indica se esiste un precedente bersaglio; 1: target, 0: nessun target (il target prima del target principale è il target precedente) D9 bit 0 indica se c'è un post- bersaglio; 1: con target, 0: senza target (the il target dopo il target principale è il after-target) |
14 byte |
| 14 | 0xEB | Ricerca numerica | D16 … … D0 | D15 D12 Modello completo D11 D10 Codice prodotto D9 D6 Versione software D5 D4 Numero APD D3 D2 Numero laser D1 D0 Versione FPGA |
20 byte |
| Note: ① Byte/bit di dati non definiti, il valore predefinito è 0; | |||||
Per ulteriori informazioni sui nostri prodotti, contattare Jioptik.