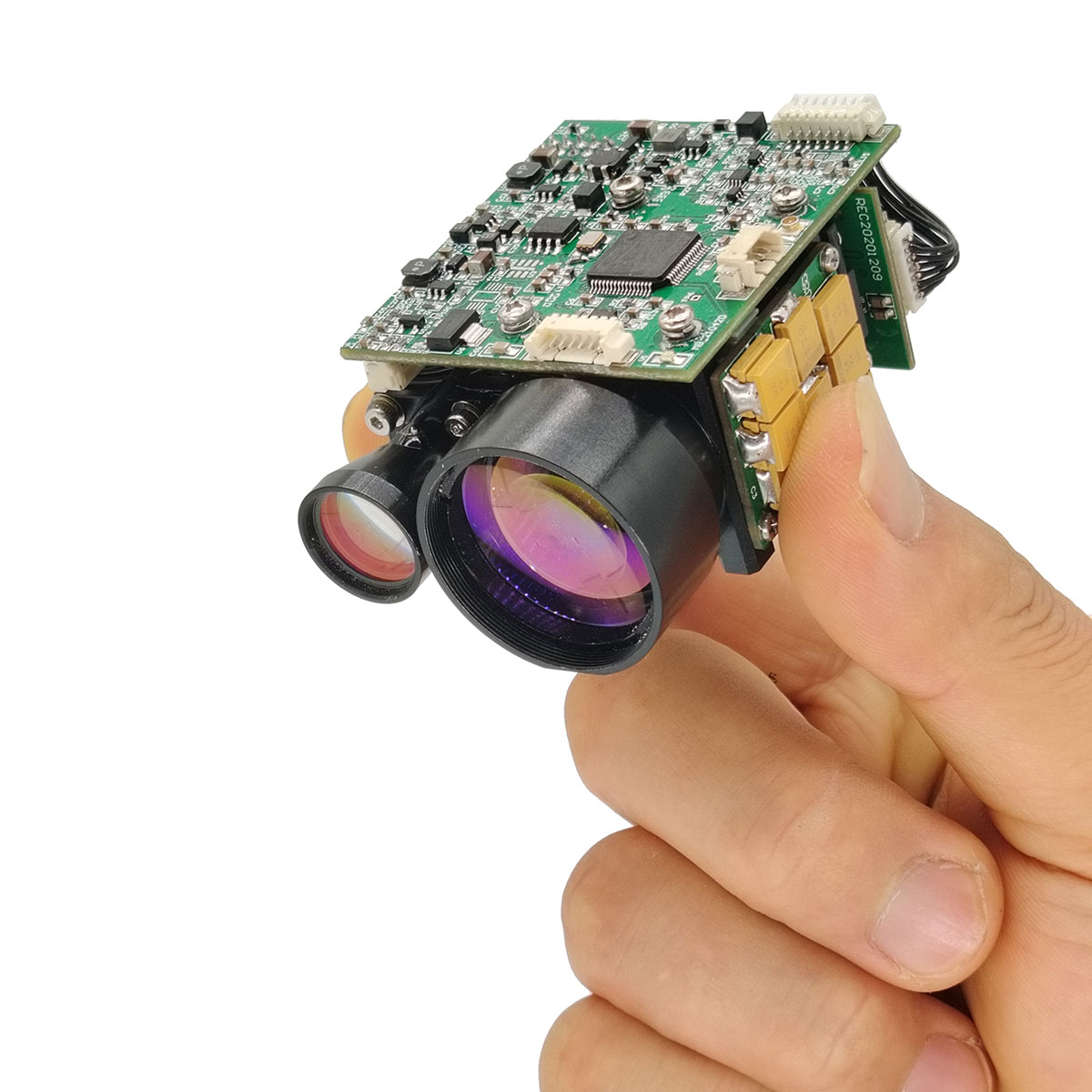
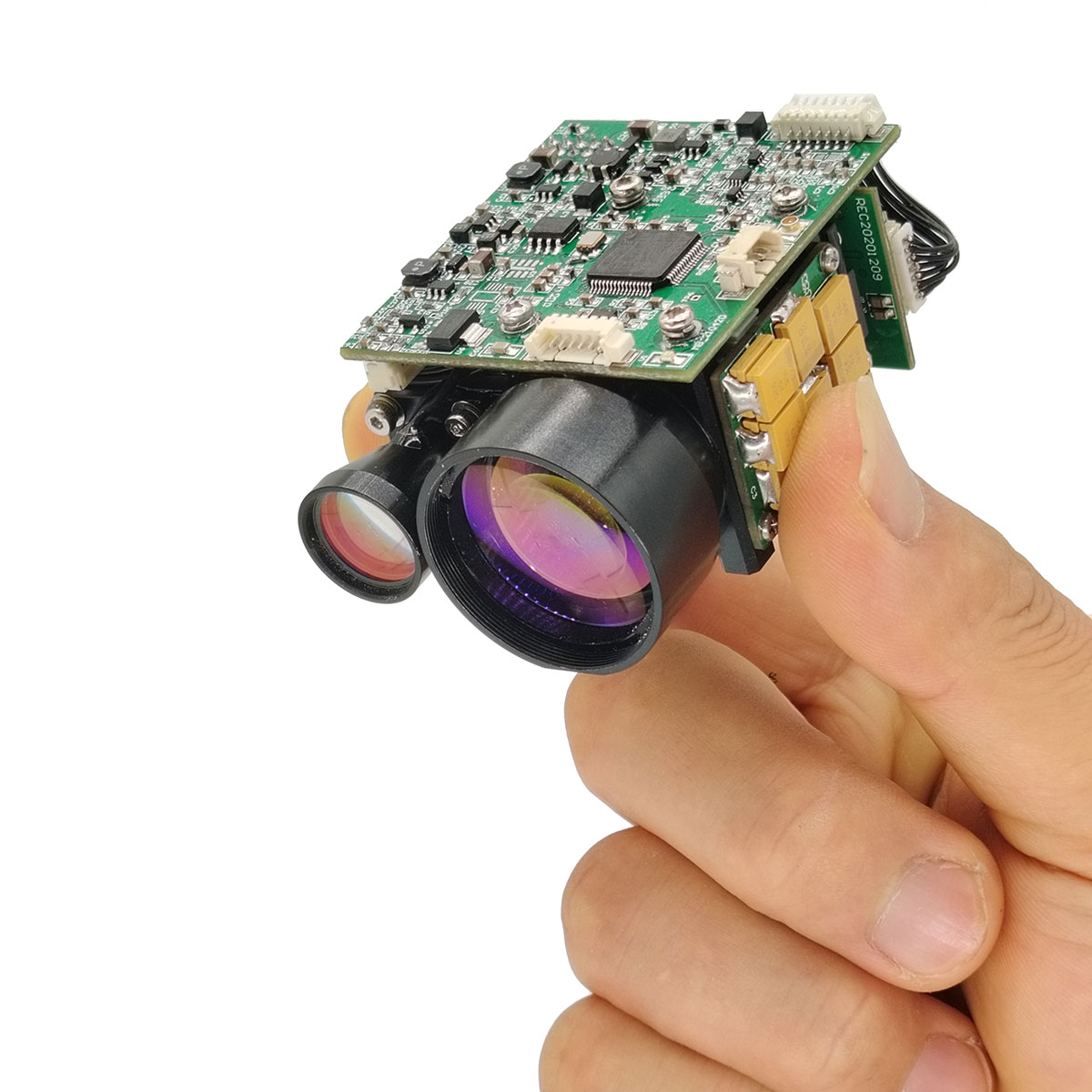
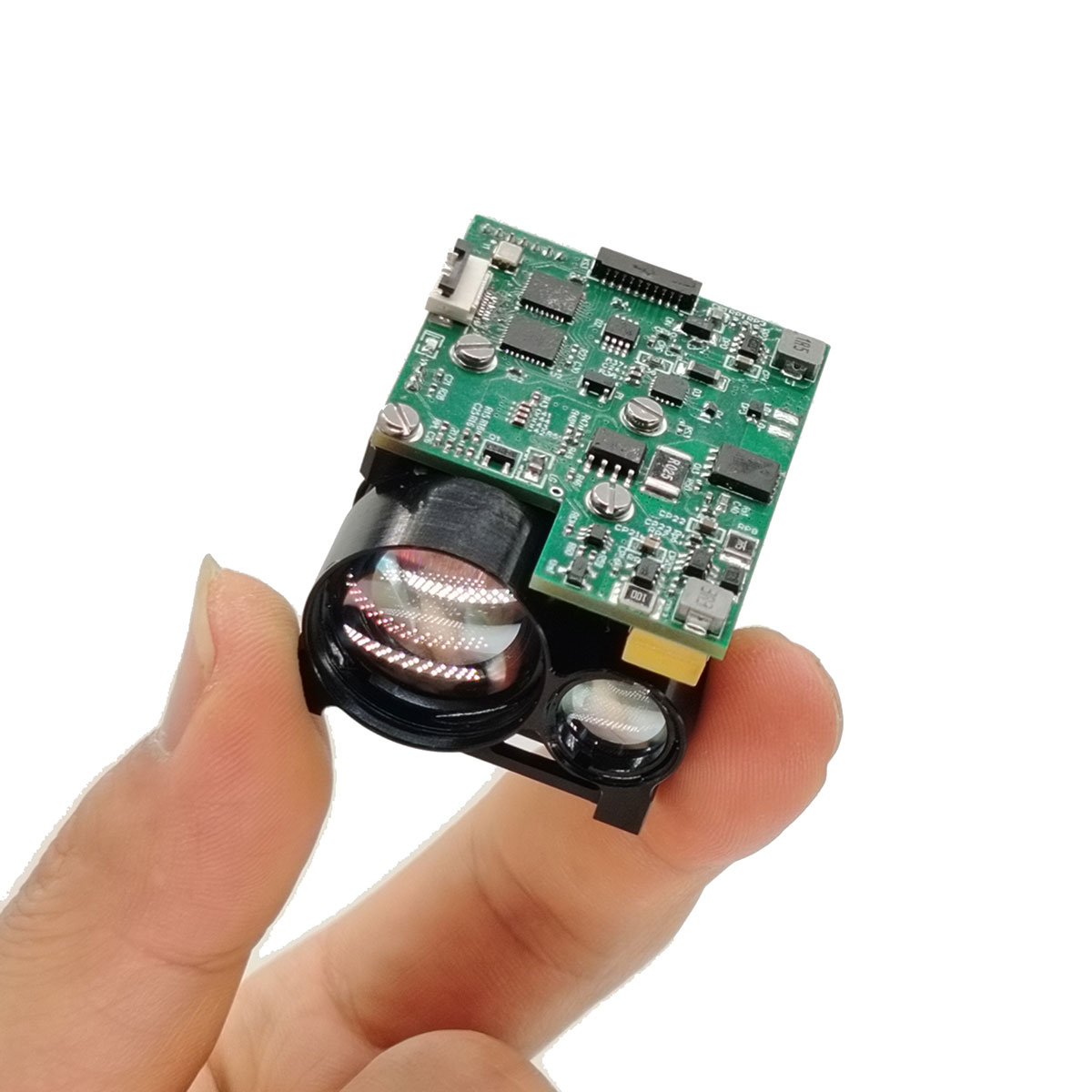
Il modulo Finder per range laser in miniatura STA-M adotta componenti laser a semiconduttore da 905 nm, con basso consumo di energia, piccole dimensioni, prestazioni stabili e altre caratteristiche, adatto per imaging termico, visione notturna e altri dispositivi mobili portatili e integrazione delle apparecchiature POD UAV miniaturizzate.
Intervallo di misurazione: 5-1200 metri
Misurazione di alberi ≥1000 metri
Accuratezza di misurazione ± 1 m
Peso ≤14 ± 0,5 g
| Modello | STA-M010X | |
| Lunghezza d'onda laser | 905nm | |
| Capacità di distanza | Edificio | 1200 m |
| Alberi | 1000 m | |
| Grado laser | Sicurezza degli occhi di classe 1 | |
| Mini gamma | 5m | |
| Risoluzione | ± 0,1 m | |
| Corrente operativa | ≤90ma | |
| Corrente di standby | ≤20mA | |
| Consumo energetico | Standby≤0.09W | |
| PEGNO≤0.23W | ||
| Interfaccia di comunicazione | Ttl | |
| Temperatura operativa | · -20 ℃ ~+55 ℃ | |
| Temperatura di conservazione | · -30 ℃ ~+60 ℃ | |
| Tensione di ingresso | 3-5 V (alimentazione 5 V raccomandata) | |
| Angolo di divergenza del raggio | 5 malattie | |
| Frequenza a distanza | 1-3Hz | |
| Energia | ≤1 MW sicuro per gli occhi umani | |
| Metodo a distanza | Impulso | |
| Peso | 14 ± 0,5 g | |
| Misurare | Φ23x47mm | |
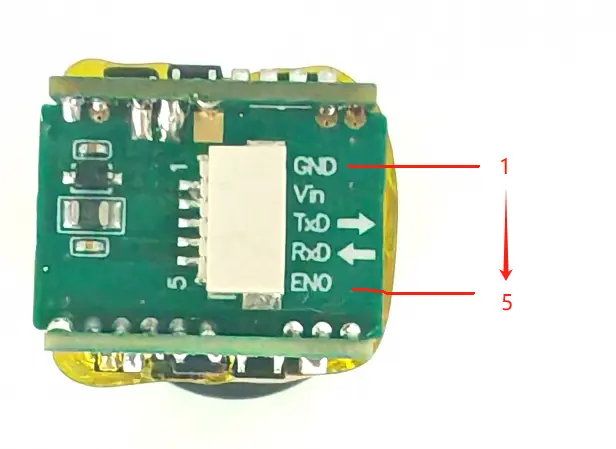
| Interfaccia TTL | |||
| Spillo | Definizione pin | Descrivere | Disegno schematico |
| 1 | GND | Alimentazione elettrica - |
|
| 2 | Vin | Alimentazione + | |
| 3 | Txd | Trasmettere dati | |
| 4 | RXD | Dati ricevuti | |
| 5 | Eno | Abilita il pin, riservato | |
| Comando principale | ||
| Codice di comando | Descrizione | Aggiungi trasmissione. risposta |
| 0x80 | Leggi lo stato di Rangefinder | NO |
| 0x81 | Leggi il risultato di misurazione | NO |
| 0x83 | Inizia a raggiungere | NO |
| 0x84 | Smetti di interrompere | NO |
| 0x9e | Programma dei parametri di comunicazione | SÌ |
| 0xbe | Leggi il parametro di comunicazione | SÌ |
| 0xc0 | Test di comunicazione | SÌ |
| 0xc1 | Leggi la versione del firmware | SÌ |
| Risposta degli schiavi | ||
| Codice di riconoscimento | Descrizione | |
| 0x60 | Frame di risposta semplice | |
| 0x01 | Frame di dati di intervallo | |
| 0x20 | frame di stato del telemetro | |
| 0x21 | Frame dei parametri di comunicazione | |
| 0xe0 | Frame di errore di errore | |
1. Il formato del frame di comunicazione:
Slaveid + istruzioni + parametro + checksum
2. L'intervallo tra due cornici adiacenti deve essere almeno il tempo di 1,5 byte quando
inviato, quando è inferiore a 1 ms, è considerato 1ms;
600 bps: 25 ms
1200 bps: 12,5 ms
2400bps: 6,25 ms
4800bps: 3.125ms
9600bps: 1,56 ms
19200bps: 1ms (0,78 ms <1ms, prendi 1ms)
3. Invio di calcolo del checksum;
Questo modulo utilizza la modalità di verifica del byte per somma dell'accumulo di byte, Slaveid non lo è
Incluso nella verifica, finalmente l'invio di checksum.
Come calcolare la somma di controllo dell'istruzione in modalità di scansione "0x83 0x40":
A.Calcula Accumulation Sum: 0x83 + 0x40 = 0xc3;
B.take lsb [d7..d0]: 0xc3;
C.Calculate 2 Complement: 0x100 - 0xc3 = 0x3d, 0x3d è checksum;
Aggiungi indirizzo slave quando Mater invia: 0x10 0x83 0x40 0x3d
4. Ricevuta di verifica;
Come il frame di comunicazione di ricezione: 0x10 0x83 0x40 0x3d, verifica non inclusa
Indirizzo slave 0x10
A.Calcula Accumulation Sum: 0x83 + 0x40 + 0x3d = 0x100;
B.take lsb di somma di accumulo: 0x00; 0x00 è il risultato della verifica;
Se il risultato della verifica è 0x00, ciò significa che i dati ricevuti sono giusti; Se il risultato della verifica
non è 0x00, ciò significa che i dati ricevuti sono sbagliati.
Nota: nell'esempio, l'indirizzo slave di ciascun comando è 0x10; nell'applicazione, l'indirizzo slave sarà quello programmato.
1 、 Test di comunicazione (0xc0 );
| Il maestro invia | ||
| Codice di comando | Parametro | Descrizione |
| 0xc0 | Nessuno | |
| Risposte degli schiavi | ||
| Codice di riconoscimento | Parametro | Descrizione |
| 0x60 | Nessuno | |
| Esempio | ||
| Master Invia: 0x10 0xc0 0x40; 0x40 è checksum Risposta di slave: 0x10 0x60 0xa0; 0xa0 è checksume |
||
2 、 comandare slave per iniziare a distanza (0x83) ;
| Il maestro invia | ||
| Codice di comando | Parametro | Descrizione |
| 0x83 | byte1 | D7: Riserva |
| D6: Modalità di distanza continua, 0 = Off; 1 = on; | ||
| D5: modalità nebbia, 0 = off; 1 = on; | ||
| D4: unità dati, 0 = metro; 1 = cortile; | ||
| D3 - D0: Modalità di lavoro, 0 = Ranging; 1 = velocità; 2 = piccola modalità target; | ||
| Risposte degli schiavi | ||
| Codice di riconoscimento | Parametro | Descrizione |
| 0x60 | Nessuno | Se lo slave è impostato come modalità di esportazione automatica, Slave risponde 0x60 per la prima volta dopo l'accoglienza del comando a distanza di avvio, al termine della fascia, invierà il risultato a distanza; |
| Esempio | ||
| Il maestro invia: 0x10 0x83 0x00 0x7d: la modalità 0 è per una misura singola, l'unità dati è metro; 0x10 0x83 0x40 0x3d: la modalità 0 è per mesure continuo, l'unità dati è un misuratore; 0x10 0x83 0x10 0x6d: la modalità 0 è per singola misura, l'unità dati è cantiere; 0x10 0x83 0x20 0x2d: la modalità 0 è per mesure continuo, l'unità dati è il cantiere; Risposta degli schiavi: 0x10 0x60 0xa0; |
||
Nota:1 、 Se il metodo di esportazione dei dati del modulo è impostato come modalità di query, può eseguire solo una singola misura;
2.In Modalità velocità, la funzione di distanza continua è nulla, che non è una misura di velocità continua;
3. La modalità FOG è valida solo per il dispositivo con la funzione della modalità FOG;
4.Slave Invierà il frame di risposta 0x60 Dopo il ricevimento del comando di inizio, inizierà a inviare risultati a distanza dopo il termine della gamma.
3 、 comando slave stop ranging (0x84) ;
| Il maestro invia | ||
| Codice di comando | Parametro | Descrizione |
| 0x84 | Nessuno | |
Nota: dopo che il Master ha inviato il comando a Slave per fare una portata continua, deve inviare questo comando a Slave per fermare la portata. Se Master invia il comando a Slave per fare una sola volta a distanza, allora non è necessario inviare questo comando, perché lo slave smetterà di intervallo automatico dopo che la gamma è terminata.
4 、 Lettura dello stato dello slave (0x80) ;
| Il maestro invia | ||
| Codice di comando | Parametro | Descrizione |
| 0x80 | Nessuno | |
| Risposte degli schiavi | ||
| Codice di riconoscimento | Parametro | Descrizione |
| 0x20 | byte1 | D7: 1 = Rangefinder occupato; 0 = Ranging finito; D6: 1 = Malfunzione del campo di range; 0 = nessun malfunzionamento; D5-D2: Riserva; D1: 0 = sensore angolo proibito; 1 = sensore angolare abilitato; D0: 0 = il sensore angolare è normale; 1 = sensore anormale anormale; |
| byte2 | Prenotare | |
5 、 Leggi Range Finder Risultato (0x81) ;
| Il maestro invia | |
| Descrizione | |
| Risposte degli schiavi | |
| Descrizione | |
| D7 :: Dati a distanza, 0 = dati validi; 1 = dati non validi; D6 :: Angle Data, 0 = dati validi; 1 = dati non validi; D5: risoluzione dei dati, 0 = 0,5/LSB; 1 = 0,1/LSB; D4: unità dati, 0 = metro; 1 = cortile; D3 - D0: Modalità di lavoro, 0 = Ranging; 1 = velocità; |
|
| Quando la distanza è valida: distanza [D15..D8]; Quando la distanza non è valida: 0x80 = che non va nessun risultato; 0x81 = errore del sistema; |
|
| Quando l'angolo è valido: distanza [d7..d0]; Quando l'angolo non è valido: riserva; |
|
| Esempio | |
| 1 、 slave invia il telaio della distanza: 0x10 0x01 0x60 0x12 0xd7 0xb6 Valore della distanza = 0x12d7 = 4823 = 482.3m 2 、 slave invia un telaio di velocità: 0x10 0x01 0x21 0x03 0xd7 0x04 Valore di velocità = 0x03d7 = 983 = 98,3 km/h 3 、 slave invia il telaio della distanza: 0x10 0x01 0xe0 0x80 0x00 0x9f Il valore della distanza non è valido (il primo byte è 0xe0, d7 = 1) |
|
6 、 Scrivi un tasso di baud di comunicazione slave (0x9e), l'impostazione della fabbrica è 19200 bps ;
| Il maestro invia | ||
| Codice di comando | Parametro | Descrizione |
| 0x9e | byte1 | deve essere 0x90 |
| byte2 | Prenotare | |
| Byte3 | Prenotare | |
| byte4 | Impostazione del tasso di baud: 0 = 1200bps; 1 = 2400bps; 2 = 4800bps; 3 = 9600bps; 4 = 19200bps (impostazione predefinita); |
|
| Risposte degli schiavi | ||
| Codice di riconoscimento | Parametro | Descrizione |
| (Fare riferimento alla parte slave di risposta del parametro slave) | ||
| Esempio | ||
| Se il master invia il frame: 0x10 0x9e 0x90 0x00 0x00 0x04 0xce; È significa: impostare il tasso di slave come 19200 bps, | ||
Nota: il nuovo tasso di baud è valido solo dopo il riavvio del modulo;
7 、 Scrivi l'indirizzo slave (0x9e), Impostazioni di fabbrica: 0x10 ;
| Il maestro invia | ||
| Codice di comando | Parametro | Descrizione |
| 0x9e | byte1 | Deve essere 0x91 |
| byte2 | Prenotare | |
| Byte3 | Prenotare | |
| byte4 | Slave Nuovo indirizzo; | |
| Risposte degli schiavi | ||
| Codice di riconoscimento | Parametro | Descrizione |
| (Fare riferimento alla parte slave di risposta del parametro slave) | ||
| Esempio | ||
| Per scrivere l'indirizzo slave come 0x20, quindi il master invia: 0x10 0x9e 0x91 0x00 0x00 0x20 0xb1 | ||
Nota:1. Il nuovo indirizzo slave è valido dopo il riavvio del dispositivo
2. 0x00 è l'indirizzo di trasmissione, quindi l'indirizzo slave non può essere impostato come 0x00;
3. Indirizzo slave predefinito è 0x10;
8 、 Scrivi Metodo di esportazione dei risultati misurati (0x9E) ;
| Il maestro invia | ||
| Codice di comando | Parametro | Descrizione |
| 0x9e | byte1 | Deve essere 0x92 |
| byte2 | Prenotare | |
| Byte3 | Prenotare | |
| byte4 | Metodo di esportazione dei risultati misurati Selectiong: 0 = modalità query (slave può esportare dati solo quando il master invia il comando di lettura) 1 (impostazione predefinita) = modalità automatica (dopo aver terminato, invia automaticamente i dati); |
|
| Risposte degli schiavi | ||
| Codice di riconoscimento | Parametro | Descrizione |
| (Fare riferimento alla parte slave di risposta del parametro slave) | ||
| Esempio | ||
| Per modificare l'esportazione dei dati in esportazione automatica, quindi Master invia: 0x10 0x9E 0x92 0x00 0x00 0x01 0xcf | ||
9 、 Impostare la tensione UART IO (0x9E), Impostazione di fabbrica: 3.3V ;
| Esempio | ||
| Codice di comando | Parametro | Descrizione |
| 0x9e | byte1 | Deve essere 0x93 |
| byte2 | Prenotare | |
| Byte3 | Prenotare | |
| byte4 | Impostazione della tensione UART IO: 72 - 199, 0,025 V/LSB; | |
| Risposte degli schiavi | ||
| Codice di riconoscimento | Parametro | Descrizione |
| (Fare riferimento alla parte slave di risposta del parametro slave) | ||
| Esempio | ||
| Cambia la tensione UART IO in 3.3V, quindi il master invia: 0x10 0x9e 0x93 0x00 0x00 0x84 0x4b | ||
Nota : Vio = Impostazione * 0,025V, VIO predefinito = 3.3V
10 、 Parametro di comunicazione di lettura (0xBe) ;
| Il maestro invia | ||
| Codice di comando | Parametro | Descrizione |
| 0xbe | byte1 | Deve essere 0x91 o 0x92 |
| Risposte degli schiavi | ||
| Codice di riconoscimento | Parametro | Descrizione |
| 0x21 | byte1 | Indirizzo slave: 0x01 - 0xFF |
| byte2 | D4: metodo di esportazione dei dati; D3 - D0: impostazione del tasso di baud; |
|
| Byte3 | Impostazione della tensione Uart Io | |
11 、 Lo slave invia informazioni errate (0xe0 );
| Risposte degli schiavi | ||
| Codice di riconoscimento | Parametro | |
| 0xe0 | byte1 | D7 - D3: Riserva; D2: 1 = errore del parametro di comunicazione; D1: 1 = Commmend irriconoscibile; D0: 1 = errore checksum; |
12 、 Leggi la versione del firmware (questo comando è stato supportato solo in V7.00 o versione più recente;) ;
| Il maestro invia | ||
| Codice di comando | Parametro | |
| 0xc1 | Nessuno | |
| Risposte degli schiavi | ||
| Codice di riconoscimento | Parametro | Note |
| 0x61 | byte0 | Versione May (BCD) |
| byte1 | Versione minore (BCD) | |
| Esempio | ||
| Risposte di slave: 0x10 0x61 0x07 0x00 0x98 I dati "0x07 0x00" indicano che la versione del firmware è V7.00. |
||
Per ulteriori informazioni sui nostri prodotti, contattare Jioptik.