STA-B1015X è un modulo di misurazione della distanza laser per occhio umano, che può rilevare la distanza target e trasmettere la distanza misurata al computer superiore attraverso la comunicazione seriale. Visibilità ≥ 15 km, riflettività target ≥ 0,3, umidità ≤ 80%, veicolo 2,3 m × 2,3 m (target NATO) Distanza di distanza ≥10 km; costruzione del modulo di canale laser a vita da 10 km (LRF).
(1) a distanza singola e a distanza continua;
(2) rispondere ai comandi che vanno al laser e può smettere di vagare in qualsiasi momento secondo il comando di arresto;
(3) dati sulla distanza di uscita e informazioni sullo stato una volta per impulso durante la misurazione della distanza;
(4) può segnalare il numero cumulativo di impulsi laser trasmessi (nessuna perdita di potenza);
(5) Selezione della distanza, indicazione target anteriore e posteriore;
(6) Funzione di autotest.
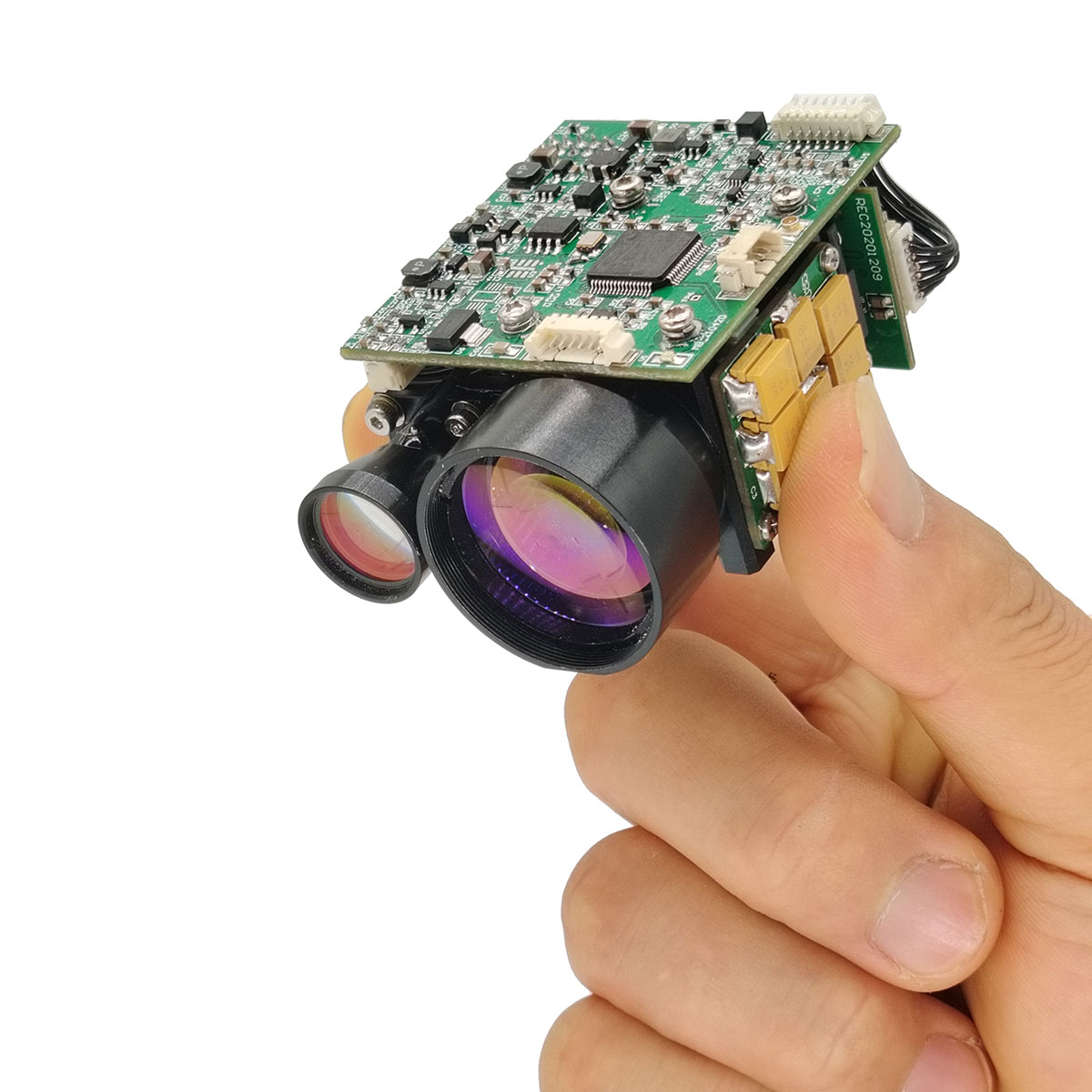
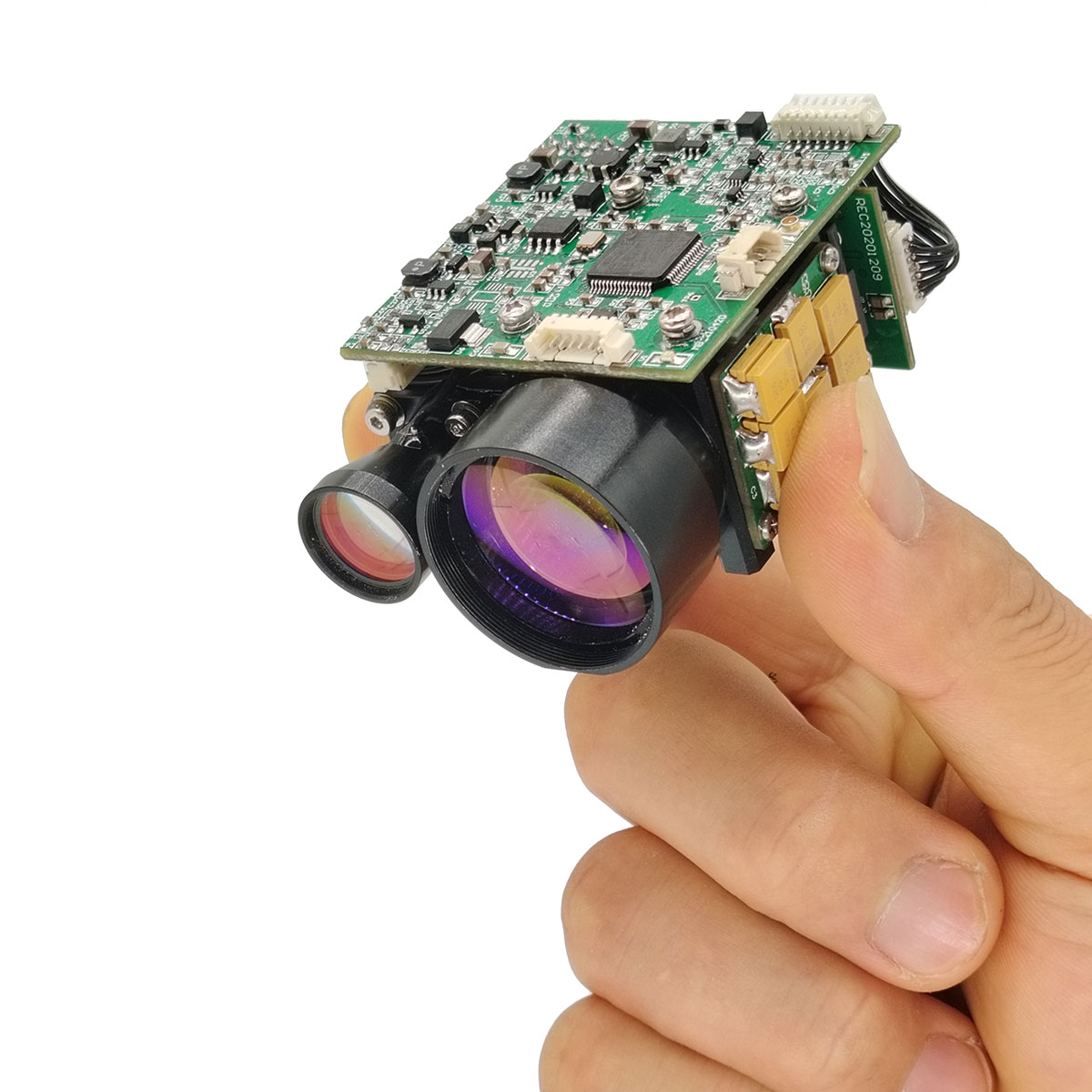
Il modulo Finder per range laser B1015x è un campo di range per laser a impulsi militare progettato per scenari di applicazione come aerei, veicoli aerei senza pilota, serbatoi e portata. Il modulo Finder per intervalli laser da 10 km (LRF) ha dimensioni ridotte, peso leggero, basso consumo energetico, prestazioni stabili, distanza di misurazione lunga e durata a lunga durata, sicurezza degli occhi umani e altri vantaggi, è un'importante attrezzatura tecnica per migliorare l'accuratezza della mira del prodotto.
Indice di prestazione del prodotto per modulo LRF B1015x Eye-Safe
| Articolo | Parametro tecnico | Istruzione |
| Modello | STA-B1015X | |
| Lunghezza d'onda di lavoro | 1535 ± 5 nm | |
| Sicurezza degli occhi | Classe 1 (IEC 60825-1) | |
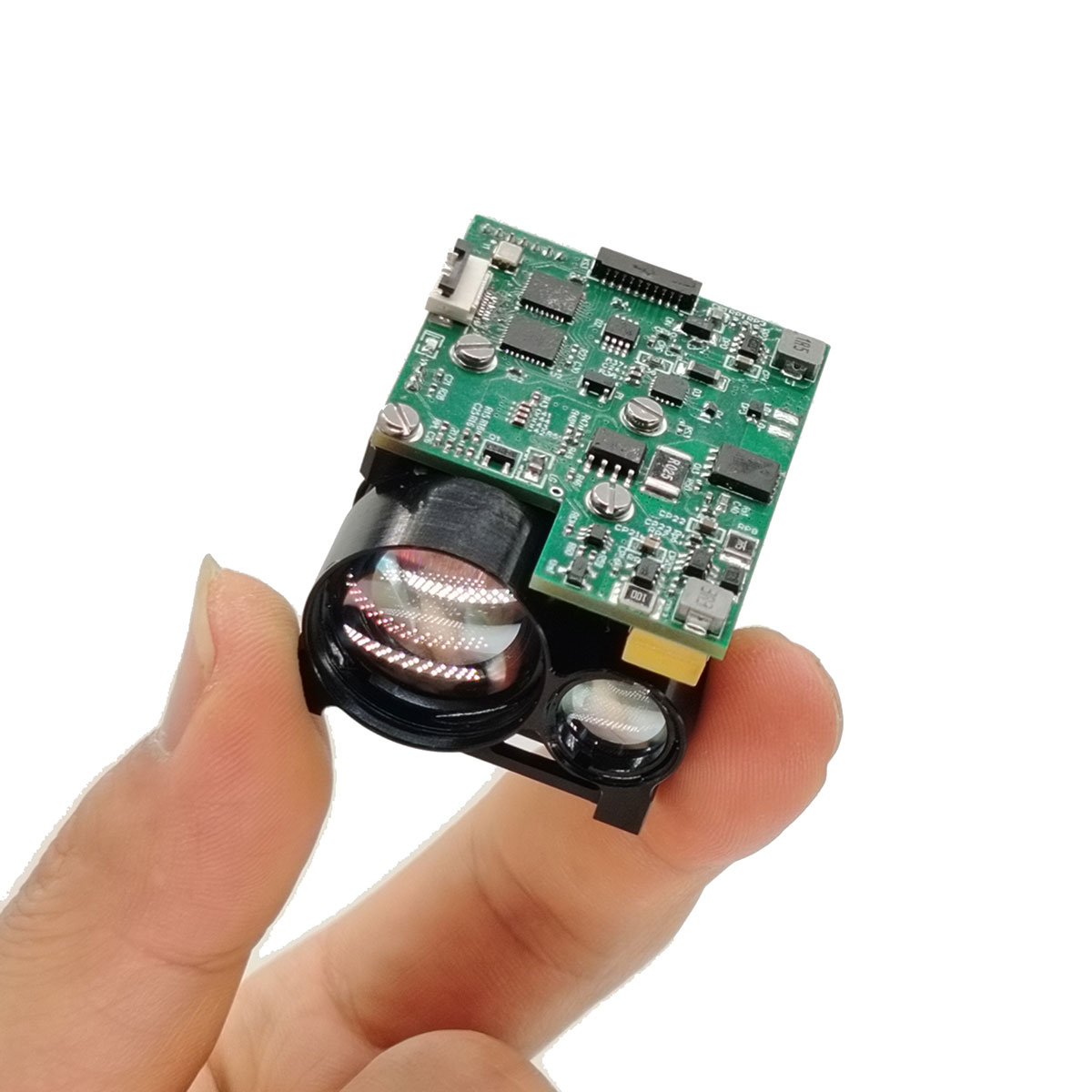
| Ricevere apertura | Φ40mm | |
| Apertura di emissione | Φ14mm | |
| Capacità di distanza | 50m-15 km | |
| Range Range | ≥18000 m | Gamma massima, riflettività: 0,9, visibilità dell'osservatore 25 km |
| ≥15000 m | Costruire obiettivi, riflettività: 0,6, visibilità dell'osservatore 25 km | |
| ≥10000m | Target NATO | |
| ≥6000 m | Bersaglio umano | |
| ≥2500m | Target UAV | |
| Mini gamma | 50m | |
| Rilevamento multi-target | Fino a 3 bersaglio | |
| Precisione a distanza | ± 1 m | 3d |
| Frequenza a distanza | 1 ~ 10Hz regolabile | |
| Tasso di precisione | ≥98% | |
| Tasso di falso allarme | 1% | |
| Angolo di divergenza | ≤0.3Mrad | |
| Interfaccia di comunicazione | Rs422 | L'interfaccia TTL/RS232 può essere personalizzata |
| Voltaggio | 9 ~ 32v | La tensione di ingresso può essere personalizzata in base ai requisiti |
| Potere di lavoro | ≤3W (@10Hz) | Test di temperatura normale |
| Potenza di punta | ≤6w | Test di temperatura normale |
| Shock meccanico | 75g, 1ms | |
| Temperatura di lavoro | -40 ℃~+60 ℃ | |
| Temperatura di conservazione | -45 ℃~+70 ℃ | |
| Affidabilità | MTBF ≥ 1500h | |
| Misurare | ≤79 × 66 × 46mm | |
| Peso | ≤120g | |
| Funzione principale | Primo e ultimo obiettivo che varia, A distanza multi-target, Selettività a distanza |
|
Note:
1) dimensione target NATO 2,3 m × 2,3 m; Dimensione del bersaglio umano 0,5 m × 1,7 m; Target Dimensioni UAV 0,2 M × 0,3 m; Riflettività 30%, visibilità dell'osservatore. 15 km

| Spillo | Definizione | Funzione | Note |
| 1 | Rx+ | Ricevitore rs422 + | Blu |
| 2 | Rx- | Ricevitore rs422 - | Verde |
| 3 | Tx- | Trasmissione rs422 - | Viola |
| 4 | TX+ | Trasmissione RS422 + | Giallo |
| 5 | GND | Comunicazione filo di terra | Bianco |
| 6 | Vee | Alimentazione + | Rosso |
| 7 | GND | Alimentazione elettrica - | Nero |
| 8 | PWN e | / | Cenere |
Adattabilità ambientale
a) Temperatura di lavoro:-40 ℃~+60 ℃.
b) Temperatura di conservazione:-45 ℃~+70 ℃.
C) vibrazione casuale:15 ~ 2000Hz, 3 direzioni. Le condizioni di test specifiche sono mostrate nella Tabella 1.
Tabella 1 Condizioni di test di vibrazione casuale
| Numero di serie | Intervallo di frequenza (HZ) | Densità spettrale di accelerazione (G2/Hz) | Tempo di vibrazione (min) |
| 1 | 15 ~ 190 | 0.01 | Vibrazione in ogni direzione 15 minuti |
| 2 | 190 ~ 210 | 0.1 | |
| 3 | 210 ~ 380 | 0.01 | |
| 4 | 380 ~ 420 | 0.025 | |
| 5 | 420 ~ 2000 | 0.01 |
Moduli che portano OEM/ODM e soluzioni personalizzate
Il B1015X è progettato per gli integratori di sistema che cercano una soluzione comoda, potente e compatta a distanza di laser. Fornisce prestazioni affidabili in una vasta gamma di applicazioni.
È molto piccolo, ultra-luce, ha un basso consumo energetico e può essere misurato a lunga distanza. È adatto per dispositivi portatili (imaging termico), applicazioni di montaggio delle armi, sistemi portatili e suite di sensori leggeri e veicoli aerei senza pilota o UGV.
1. Protocollo di trasmissione: comunicazione seriale asincrona;
2. Porta di porta: 115200;
3. BIT di dati: 10Bit: un bit di avvio, 8 bit di dati, un bit di arresto, verifica non valida;
4. Struttura dei dati: i dati sono costituiti dal byte di intestazione, parte del comando, lunghezza dei dati, parte dei parametri e byte di controllo;
5. Modalità di comunicazione: il controllo principale invia comandi di controllo alla macchina a distanza e la macchina a distanza riceve ed esegue le istruzioni. Nello stato a distanza, la macchina a distanza invia dati e stato della macchina a distanza al computer superiore in base al ciclo a distanza. Il formato di comunicazione e il contenuto del comando sono mostrati nella tabella seguente.
A) Invia il controllo principale
Il formato del messaggio da inviare è il seguente:
| STX0 | Cmd | Len | Data1h | Data1l | Chk |
Tabella 2 Descrizione del formato del messaggio inviato
| numero d'ordine | nome | spiegare | codice | Osservazioni |
| 1 | STX0 | Flag di avvio del messaggio | A5 (H) | |
| 2 | Cmd | CW | Vedi Tabella 3 | |
| 3 | Len | Dl | Il numero di tutti i byte tranne il marchio iniziale, la parola di comando e il checksum | |
| 4 | Datah | parametro | Vedi Tabella 3 | |
| 5 | arrivo | |||
| 6 | Chk | XOR Verifica | Tranne il byte valido, tutti gli altri byte sono xed |
Il comando è descritto come segue:
Tabella 3 Descrizione dei comandi e delle parole di dati inviate dal master alla macchina a distanza
| numero d'ordine | CW | funzione | byte di dati | Osservazioni | lunghezza | Codice di esempio |
| 1 | 0x00 | cessare | Datah = 00 (H) Datal = 00 (H) |
Il telemetro smette di misurare | Sei byte | A5 00 02 00 A7 |
| 2 | 0x01 | A distanza singola | Datah = 00 (H) Datal = 00 (H) |
Sei byte | A5 01 02 00 00 A6 | |
| 3 | 0x02 | A distanza continua | Datah = xx (H) Datal = YY (H) |
I dati descrivono il periodo di distanza, in MS | Sei byte | A5 02 02 03 E8 4E (1Hz Ranging) |
| 4 | 0x03 | auto-controllo | Datah = 00 (H) Datal = 00 (H) |
Sei byte | A5 02 02 00 A4 | |
| 5 | 0x04 | Imposta la distanza più vicina alla selezione | Datah = xx (H) Datal = YY (H) |
I dati descrivono il valore della zona cieca, unità 1m | Sei byte | A5 04 02 00 64 C7 (100 m è la distanza più vicina) |
| 6 | 0x06 | Numero cumulativo di query di uscita luminosa | Datah = 00 (H) Datal = 00 (H) |
Numero cumulativo di query di uscita luminosa | Sei byte | A5 06 02 00 A1 |
| 7 | 0x11 | Il potere APD è acceso | Datah = 00 (H) Datal = 00 (H) |
Sei byte | A5 11 02 00 B6 | |
| 8 | 0x12 | APD Power è spento | Datah = 00 (H) Datal = 00 (H) |
Sei byte | A5 12 02 00 B5 | |
| 9 | 0xeb | Query numerica | Datah = 00 (H) Datal = 00 (H) |
Query numerica | Sei byte | A5 EB 02 00 00 4C |
a) Il controllo principale riceve il formato
Il formato del messaggio ricevuto è il seguente:
| STX0 | Cmd | Len | Dati | Data0 | Chk |
Tabella 4 Descrizione del formato dei messaggi ricevuti
| numero d'ordine | nome | spiegare | codice | Osservazioni |
| 1 | STX0 | Messaggio Start Flag 1 | A5 (H) | |
| 2 | Cmd_jg | Parola di comando dati | Vedi Tabella 5 | |
| 3 | Len | Dl | Il numero di tutti i byte tranne il marchio iniziale, la parola di comando e il checksum | |
| 4 | Dn | parametro | Vedi Tabella 5 | |
| 5 | D0 | |||
| 6 | Chk | XOR Verifica | Tranne il byte valido, tutti gli altri byte sono xed |
Controllo principale che riceve lo stato Descrizione:
La tabella 5 descrive la parola dati inviata dal rangefinder al controller principale
| numero d'ordine | CW | funzione | byte di dati | Osservazioni | lunghezza complessiva |
| 1 | 0x00 | cessare | D1 = 00 (H) D0 = 00 (H) |
Sei byte | |
| 2 | 0x03 | auto-controllo | D8 ~ d1 | D8 -D7: tensione -5V, unità 0,01V. D6-D5: valore spot cieco, unità 1m D4: valore ad alta tensione APD, unità V; D3: tipo di carbone, che indica la temperatura APD, unità: gradi Celsius; D2-D1: +5 V Tensione, unità 0,01V |
12 byte |
| 3 | 0x04 | Distanza dall'impostazione di accesso più vicina, unità M | D1 D0 | I dati descrivono il valore della distanza più vicino, unità 1M; Inizia in alto e finisci in basso |
Sei byte |
| 4 | 0x06 | Numero cumulativo di query di uscita luminosa | D3 ~ d0 | I dati esprimono il numero di luci, 4 byte, con il byte alto prima | Sette byte |
| 5 | 0x11 | Il potere APD è acceso | D1 = 00 (H) D0 = 00 (H) |
Il potere APD è acceso | Sei byte |
| 6 | 0x12 | APD Off | D1 = 00 (H) D0 = 00 (H) |
APD Power è spento | Sei byte |
| 7 | 0xed | Lavorare gli straordinari | 0x00 0x00 | Il laser è sotto protezione da lavoro laser e non può essere misurato. | Sei byte |
| 8 | 0xee | Errori di efficacia | 0x00 0x00 | Sei byte | |
| 9 | 0xef | Timeout di comunicazione della porta seriale | 0x00 0x00 | Sei byte | |
| 10 | 0x01 | Misurazione a intervallo singolo (target singolo, zero per il secondo e terzo obiettivo, zero per il terzo bersaglio all'inizio e alla fine del bersaglio) | D9 D8 D7 D6 D5 D4 D3 D2 D1 D0 |
D8-D6 Prima distanza target (unità 0,1M) Distanza D5-D3 al secondo target (unità: 0,1m) D2-D0 Terza distanza target (unità 0,1M) 3. Gli obiettivi vanno da vicino Byte bandiera D9 (bit7-bit0): D9 è la settima posizione che indica l'onda principale; 1: c'è un'onda principale, 0: nessuna onda principale. D9 è la sesta posizione che indica l'eco; 1: c'è eco, 0: nessuna eco D9 La quinta posizione indica lo stato del laser; 1: laser normale, 0: guasto laser D9 è il quarto bit della bandiera timeout, 1: normale, 0: timeout D9 non è valido alla terza posizione (impostata su 1); D9 La seconda posizione indica lo stato APD; 1: normale, 0: errore D9 è la prima posizione per indicare se esiste un obiettivo precedente; 1: esiste un obiettivo precedente, 0: nessun obiettivo precedente (target nell'area cieca). D9 Il 0 ° bit indica se esiste un target successivo; 1: esiste un target successivo, 0: nessun obiettivo successivo (l'obiettivo dopo l'obiettivo principale è l'obiettivo successivo) |
14 byte |
| 11 | 0x02 | Ranging continuo (bersaglio singolo, zero per il secondo e terzo obiettivo, zero per il terzo bersaglio all'inizio e alla fine del bersaglio) | D9 D8 D7 D6 D5 D4 D3 D2 D1 D0 |
D8-D6 Prima distanza target (unità 0,1M) Distanza D5-D3 al secondo target (unità: 0,1m) D2-D0 Terza distanza target (unità 0,1M) 3. Gli obiettivi vanno da vicino Byte bandiera D9 (bit7-bit0): D9 è il 7 ° bit per indicare l'onda principale; 1: c'è un'onda principale, 0: nessuna onda principale. D9 è la sesta posizione che indica l'eco; 1: c'è eco, 0: nessuna eco D9 La quinta posizione indica lo stato del laser; 1: laser normale, 0: guasto laser D9 è il quarto bit della bandiera timeout, 1: normale, 0: timeout D9 non è valido alla terza posizione (impostata su 1); D9 La seconda posizione indica lo stato APD; 1: normale, 0: errore D9 è la prima posizione per indicare se esiste un obiettivo precedente; 1: esiste un obiettivo precedente, 0: nessun obiettivo precedente (target nell'area cieca). D9 Il 0 ° bit indica se esiste un target successivo; 1: esiste un target successivo, 0: nessun obiettivo successivo (l'obiettivo dopo l'obiettivo principale è l'obiettivo successivo) |
14 byte |
| 12 | 0xeb | Query numerica | D17 …… D0 | D17 D16 D15 D14 D13 D12 Codice modello di macchina intera Numero prodotto D11d10 Versione software D9 D6 Numero APD D5 D4 D3 D2 Laser Numer Versione D1 di FPGA |
22 byte |
| Nota: ① byte/bit dati non definiti, predefinito è 0; | |||||
Per ulteriori informazioni sui nostri prodotti, contattare Jioptik.